/webcode.jsp
/de/suche/index.jsp
https://publikationen.dguv.de/DguvWebcode?query=

Prototyp des Kraft-Druck-Messgerätes in der Anwendung, Bild 2
Bild: MRK-Systeme GmbH
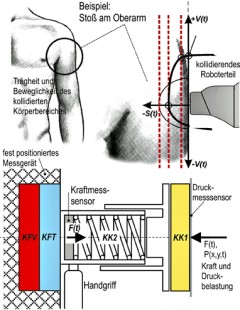
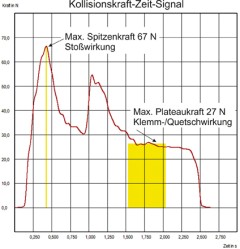
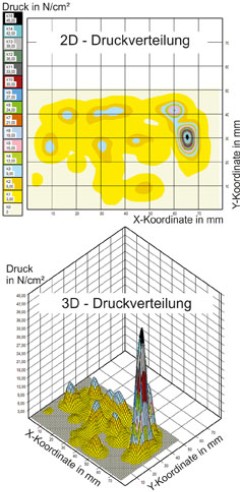
An Arbeitsplätzen mit kollaborierenden Robotern können unter bestimmten Bedingungen Kollisionen zwischen Mensch und Roboter stattfinden. Im Rahmen der erforderlichen Risikobeurteilung muss die bei kritischen Kollisionsvorgängen auftretende Belastung mit einem biofidelen (mechanisch menschenähnlich) Messgerät ermittelt werden. Die Prüfung einer akzeptierten Beanspruchungsschwere nach den vorliegenden Normdokumenten erfordert die Messung, Analyse und Bewertung der maximalen Kollisionskraft und des dabei auftretenden lokalen maximalen Drucks in der Kollisionsfläche. Diese beiden Beanspruchungskriterien müssen sowohl für dynamische als auch für quasistatische Kollisionswirkungen ermittelt und überprüft werden.
Um die Kriterien bei einer Kollisionsbelastung erfassen und bewerten zu können, entwickelte das IFA das Kraft-Druck-Messgerät KDMG-KOLROBOT. Es kann im Rahmen von Risikobeurteilungen in der betrieblichen Praxis eingesetzt werden. Bild 1 zeigt den schematischen Aufbau des Geräts mit den wesentlichen Messeigenschaften und Bild 2 eine Anwendungssituation.
Das Messgerät besitzt einen zweistufigen Kompressionsaufbau, der die Verformbarkeit relevanter Körperstellen, die in Mitleidenschaft gezogen werden können, simuliert. Für alle Einzelbereiche des Körpermodells wird die Körperverformbarkeit nach den relevanten Normdokumenten durch verformbare Kunststoffplatten und Federn berücksichtigt. Für einen Kollisionsvorgang wird so die Steifigkeit der betroffenen Körperstelle mit dem Messgerät simuliert und die äußere Gesamtkraft und die Druckverteilung in der Kollisionsfläche werden ermittelt. Zur Messung der Kraft dient ein fest integrierter Sensor (siehe Bild 3), zur Messung der Druckverteilung (siehe Bild 4) können unterschiedliche Sensorsysteme eingesetzt werden. Das Mess- und Auswertesystem wird mit einer eigens entwickelten Software komplett PC-gesteuert betrieben.
Das Messgerät wird bei einer Kollisionsmessung an einem starren Anschlag festgesetzt. Da das Trägheitsverhalten des menschlichen Körpers bei einer realen Kollision dämpfend wirken kann, können Anpassungen der Messsignale vorgenommen werden, die den beanspruchten Körperpunkt und die Körperhaltung berücksichtigen. Zur Ermittlung der hierzu erforderlichen Anpassungsfunktionen finden Untersuchungen mit Probandenkollektiven statt. Zudem werden die Messsignale in Bezug auf die Kollisionsgeschwindigkeit angepasst.
Das Mess- und Auswertegerät KDMG-KOLROBOT berücksichtigt durch sein Konstruktionsdesign mit dem zugrunde liegenden Mess- und Auswerteprinzip die relevanten mechanischen Eigenschaften differenzierter Körperbereiche. Es stellt durch diese Biofidelität und die Spezifikationsparameter der Messsysteme und Auswerteverfahren ein Standardmessverfahren mit hoher Genauigkeit, Reproduzierbarkeit und Gebrauchstauglichkeit dar. Das Messgerät erfüllt somit die normgemäßen Voraussetzungen für ein geeignetes Prüfverfahren und kann für die Prüfung der medizinisch/biomechanischen Anforderungen verwendet werden.
Durch konstruktive Gestaltung des Robotersystems/Arbeitsplatzes oder entsprechende Parametrisierung der Robotersteuerung kann bei Anwendung des Messgerätes die Körperbelastung so verringert werden, dass sie unterhalb der nach Risikobeurteilung definierten Beanspruchungsschwere liegt.
Das Kraft-Druck-Messgerät KDMG-KOLROBOT wird in Lizenz vertrieben durch das Unternehmen GTE Industrieelektronik GmbH, Helmholtzstr. 21, 38-40, 41747 Viersen. Alle in den nächsten Jahren zu erwartenden normrelevanten Entwicklungen von Prüfkriterien oder der Biofidelität des Prüfverfahrens können in das Messgerätedesign integriert werden.
 - Prüftechnik")
Ende 2023 ist die neue Norm ISO/PAS 5672 erschienen: Robotics - Collaborative applications - Test methods for measuring forces and pressures in human-robot contacts
 - Prüftechnik")
 - Prüftechnik")
Projekt-Nr. IFA5120: Entwicklung eines Kraft-Druck-Messgerätes zur Messung und Bewertung von Mensch-Roboter-Kollisionen
Projekt-Nr. IFA5151: Analyse von Kraft-Druck-Messgeräten für eine einheitliche Kontrolle von Kraft- und Leistungsbegrenzten Robotern
Projekt-Nr. IFA5160:Entwicklung und Evaluation eines messtechnischen Konzeptes für kollaborierende Roboter
 - Prüftechnik")
Unfallprävention: Digitalisierung - Technologien
Tel: +49 30 13001-3510